JUC学习笔记
简介
从JDK1.5开始,Java提供了java.util.concurrent包,在此包中增加了在并发编程中很常用的工具类,并在JDK21中加入了协程(Virtual Thread)。多线程并发作为Java中的重要内容,本文希望从JUC出发,整理相关内容,学习并发编程。
Java内存模型 / Java Memory Model
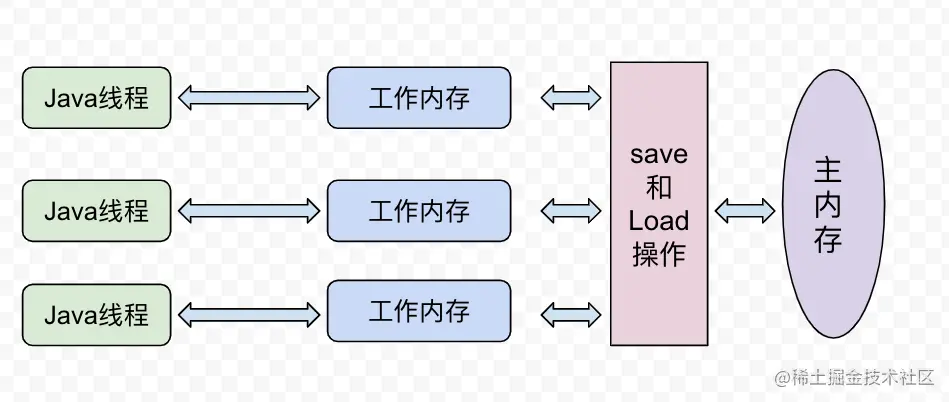
JMM规定所有变量都存储在主内存中,每条线程还有自己的工作内存。线程的工作内存中保存了被线程使用的变量的主内存副本,线程对变量的所有操作都必须在工作内存中进行,而不能直接读写主内存中的数据。不同线程之间也无法直接访问对方的工作内存中的变量,线程间变量值的传递需要通过主内存来完成。
每条线程都有自己的工作空间,而共享变量存储在共享内存中。线程在运行时会首先将共享内存中的数据读取到自己的工作内存,即在线程的工作内存中复制了一个共享变量的副本,然后对其进行计算,计算完成后线程会将自己工作内存中的这个共享变量副本同步回主内存。线程、工作内存、与主内存的关系如下图所示:
关键字
volatile
volatile变量有两大作用:
- 保证可见性:指当一个线程修改了共享变量后,另外的线程能立即感知这个变量被修改。
- 保证有序性:指程序按照代码的先后顺序执行。有时候为了优化性能,编译器会对字节码指令进行重排序,但是能保证重排序后的执行结果与重排序之前是一致的。
保证可见性
通过例子来说明:
public class VolatileDemo { |
代码中定义了一个boolean类型的成员变量ready,其默认值为false。在MyThread线程中判断如果ready为false时则进行死循环。接下来在main方法中开启MyThread线程,并在睡眠1s后将ready修改为true。正常情况下ready修改为true后MyThread线程中的死循环则会停止,并打印”MyThread is end”。但实际上的运行结果为:
MyThread is running... |
可以看见当ready被修改为true后,MyThread线程依然未结束。通过这一例子也证实了MyThread线程中的ready副本并没有得到及时的更新。
那么接下来我们将成员变量ready使用volatile关键字修饰:
public class VolatileDemo { |
再运行看打印日志:
MyThread is running... |
当在主线程中修改了ready为true后,MyThread线程立即感知了ready的变化,并结束了死循环,从这个例子中也可以看出volatile确实能有效的保证多个线程共享变量的可见性。
保证有序性
volatile保证有序性在开发中有一个很常见的例子,即双重锁校验的单例模式下需要使用volatile关键字来禁止指令重排序。我们来看代码:
public class DoubleCheckLock { |
如果上述代码中没有给instance加上volatile关键字会怎么呢?
首先我们应该清楚instance = new DoubleCheckLock();这一操作并不是一个原子操作,实例化对象的字节指令可以分为如下三步:
- 分配对象内存:memory = allocate();
- 初始化对象:instance(memory);
- instance指向刚分配的内存地址:instance = memory;
而由于编译器的指令重排序,以上指令可能会出现以下顺序:
- 分配对象内存:memory = allocate();
- instance指向刚分配的内存地址:instance = memory;
- 初始化对象:instance(memory);
以优化后的字节码指令来看双重锁校验的代码是否有问题呢?不难发现,如果线程A第一次调用单例方法,在该线程的时间片轮转结束后执行到了优化后的第二个指令,即instance被赋值,但是还未被分配初始化对象。此时,线程B抢到了CPU时间片,同时调用了getInstance方法,第一次校验就发现instance不为null,遂将其返回。在得到这个单例后调用单例的方法,此时必定出现空指针异常。因此,可见指令重排序在多线程并发的情况下是会出现问题的。此时,我们便可以通过volatile关键字来禁止编译器的优化,从而避免空指针的出现。
synchronized
synchronized 是 Java 中用于实现线程同步的关键字,它提供了一种独占锁的机制,用于确保多个线程之间的互斥访问共享资源。
synchronized可以用来修饰实例方法和静态方法,也可以用来修饰代码块,值的注意的是synchronized是一个对象锁,因此,无论使用哪一种方法,synchronized都需要有一个锁对象。
修饰实例方法
synchronized修饰实例方法只需要在方法上加上synchronized关键字即可
public synchronized void add(){ |
此时,synchronized加锁的对象就是这个方法所在实例的本身。
修饰静态方法
synchronized修饰静态方法的使用与实例方法并无差别,在静态方法上加上synchronized关键字即可
public static synchronized void add(){ |
此时,synchronized加锁的对象为当前静态方法所在类的Class对象。
修饰代码块
synchronized修饰代码块需要传入一个对象。
public void add() { |
很明显,此时synchronized加锁对象即为传入的这个对象实例。
synchronized锁优化
为了解决synchronized效率低下,在JDK1.6中引入了偏向锁和轻量级锁来优化synchronized。此时的synchronized一共存在四个状态:无锁状态、偏向锁状态、轻量级锁状态和重量级锁状态。锁着锁竞争激烈程度,锁的状态会出现一个升级的过程,即可以从偏向锁升级到轻量级锁,再升级到重量级锁。锁升级的过程是单向不可逆的,即一旦升级为重量级锁就不会再出现降级的情况。
ReentrantLock
ReentrantLock是一种显式锁,需要我们手动编写加锁和释放锁的代码,下面我们来看下ReentrantLock的使用方法。
public class ReentrantLockDemo { |
上述代码中lock.lock()会进行拿锁操作,如果拿不到锁则会一直等待。如果拿到锁之后则会执行try代码块中的代码。接下来在try代码块中又通过tryLock(100, TimeUnit.MILLISECONDS)方法尝试再次拿锁,此时,拿锁最多会等待100毫秒,如果在100毫秒内能获得锁,则tryLock方法返回true,拿锁成功,执行i++操作,如果返回false,获取锁失败,i++不会被执行。(因为第一次线程已经拿到锁了,由于ReentrantLock是可重入,因此,第二次必定能拿到锁。另外,要注意被ReentrantLock加锁区域必须用try代码块包裹,且释放锁需要在finally中来避免死锁。执行几次加锁,就需要几次释放锁。
公平锁与非公平锁
公平锁是指多个线程按照申请锁的顺序来获取锁,线程直接进入同步队列中排队,队列中最先到的线程先获得锁。非公平锁是多个线程加锁时每个线程都会先去尝试获取锁,如果刚好获取到锁,那么线程无需等待,直接执行,如果获取不到锁才会被加入同步队列的队尾等待执行。
公平锁和非公平锁各有优缺点,适用于不同的场景:
- 公平锁的优点在于各个线程平等,每个线程等待一段时间后,都有执行的机会;而它的缺点相较于非公平锁整体执行速度更慢,吞吐量更低。同步队列中除第一个线程以外的所有线程都会阻塞,CPU唤醒阻塞线程的开销比非公平锁大。
- 非公平锁的优点是可以减少唤起线程的开销,整体的吞吐效率高,因为线程有几率不阻塞直接获得锁,CPU不必唤醒所有线程;它的缺点也比较明显,即队列中等待的线程可能一直或者长时间获取不到锁。
可重入锁与非可重入锁
可重入锁又名递归锁,是指同一个线程在获取外层同步方法锁的时候,再进入该线程的内层同步方法会自动获取锁(前提锁对象得是同一个对象或者class),不会因为之前已经获取过还没释放而阻塞。非可重入锁与可重入锁是对立的关系,即一个线程在获取到外层同步方法锁后,再进入该方法的内层同步方法无法获取到锁,即使锁是同一个对象。
synchronized与ReentrantLock都属于可重入锁。可重入锁可以有效避免死锁的产生。
AbstractQueuedSynchronizer
ReentrantLock中的几个核心方法的实现都是调用了Sync中的相关方法,而Sync的主要逻辑在父类AbstractQueuedSynchronizer中实现。(待补充)
CAS
CAS是Compare And Swap的简称,即比较并交换的意思。CAS是一种无锁算法,其算法思想如下:
CAS的函数公式:compareAndSwap(V,E,N); 其中V表示要更新的变量,E表示预期值,N表示期望更新的值。调用compareAndSwap函数来更新变量V,如果V的值等于期望值E,那么将其更新为N,如果V的值不等于期望值E,则说明有其它线程跟新了这个变量,此时不会执行更新操作,而是重新读取该变量的值再次尝试调用compareAndSwap来更新。
可见CAS其实存在一个循环的过程,如果有多个线程在同时修改这一个变量V,在修改之前会先拿到这个变量的值,再和变量对比看是否相等,如果相等,则说明没有其它线程修改这个变量,自己更新变量即可。如果发现要修改的变量和期望值不一样,则说明再读取变量V的值后,有其它线程对变量V做了修改,那么,放弃本次更新,重新读变量V的值,并再次尝试修改,直到修改成功为止,这个循环过程一般也称作自旋。
CAS的缺点
虽然通过CAS可以实现无锁同步,但是CAS也有其局限性和问题所在。
只能保证一个共享变量的原子性:CAS不像synchronized和RetranLock一样可以保证一段代码和多个变量的同步。对于多个共享变量操作是CAS是无法保证的,这时候必须使用枷锁来是实现。
存在性能开销问题:由于CAS是一个自旋操作,如果长时间的CAS不成功会给CPU带来很大的开销。
ABA问题:因为CAS是通过检查值有没有发生改变来保证原子性的,假若一个变量V的值为A,线程1和线程2同时都读取到了这个变量的值A,此时线程1将V的值改为了B,然后又改回了A,期间线程2一直没有抢到CPU时间片。知道线程1将V的值改回A后线程2才得到执行。那么此时,线程2并不知道V的值曾经改变过。这个问题就被成为ABA问题。
ABA问题的解决其实也容易处理,即添加一个版本号,更次更新值同时也更新版本号即可,
AtomicStampedReference就是用来解决ABA问题的。